improper rotation & 수도스케일러(pseudoscalar) 수도벡터(pseudovector) 수도텐서(pseudotensor)
Physics/Math./Mech./Gen. Relativity2008. 12. 28. 15:32 |좌표를 회전시키는 행렬이 직교함을 보였으므로, 이 좌표변환행렬의 디터미넌트는 +1 아니면 -1 이다.
|λ| |λ(transpose)| = | I | ⇒ |λ| ² = 1
|λ| = 1 인 경우, proper rotation 이라고 하고, |λ| = - 1 인 경우, improper rotation 이라고 한다. improper rotation 의 경우, inversion 이 포함되어있는것으로 볼 수 있다. 간단한 예로, 미러 인버젼( mirror inversion )이 있다. 고개만 까딱해서 삐딱하게 보는건 proper rotation 이다.
앞에서 스케일러, 벡터, 텐서를 좌표변환에 의해 다음과 같이 정의했었다. 모두 텐서적인 정의이고, 스케일러와 벡터는 텐서의 범주에 포함된다.
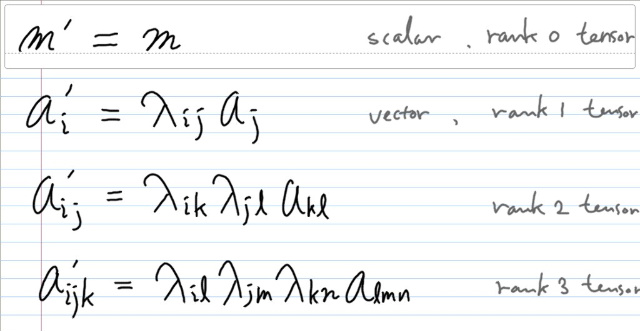
우리는 랭크2까지 유도를 했지만, 마찬가지로 계속 확장하면 된다. 프라임 표시를 한것은 서로 다른좌표에서의 값임을 구분하기 위해서 한 것일뿐, 실제로 두 좌표계 사이에는 어떤 선후관계도 없기 때문에, 프라임은 단지 우리의 편의를 위한 것일뿐 실제로는 아무것도 아니다.
이제, 임프라퍼 로테이션과 텐서를 연관지어보자.
이상적인 거울을 "너무 맑고 깨끗해서, 거울인지 아닌지를 분간할 수 없는 거울"이라고 하자. 우리가 어떤 창을 통해 다른곳을 바라본다고 하자. 일체의 배경지식 (가령 "사람들은 대체로 오른손잡이다" 라는가... )을 배제하기로 하면, 우리는 그 광경이 거울을 통해서 바라본것인지 아닌지를 분간할 수 있을까?
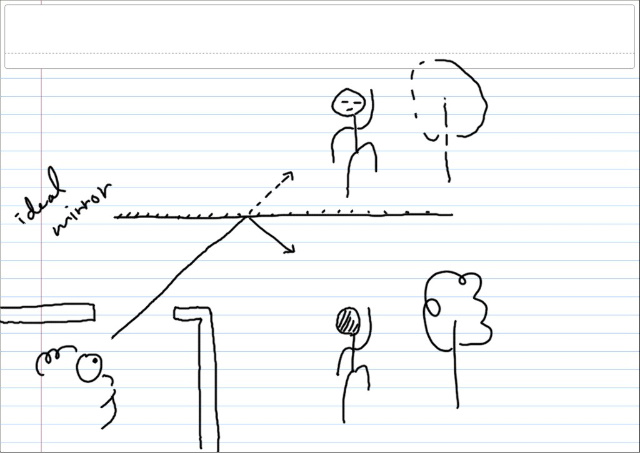
아마 물리적 센스가 있는 사람이라면 스테레오 그래픽한 것을 생각해볼 것이다. 오른나사, 왼나사 이런것 말이다. 오른나사는 거울로 보면 왼나사로 보이고, 왼나사는 오른나사로 보인다.
위의 그림과 마찬가지로, 창밖을 통해, 어떤로켓이 오른나사회전을 하며 진행하는 상황을 목격했다고 하자. 그것이 실제로 오른나사진행하는 로켓인지, 왼나사진행하는 로켓이 거울을 통해 보이는 것인지... 우리는 그 둘을 구별할 수가 없다....
아마도, 물리법칙들은 거울속 세상에서도 성립해야 할 것이다. F=ma 는 거울속에서도 F=ma 이다 (improper rotation). 물론, 고개를 꺾어서 봐도 F=ma 이다.(proper rotation)
위에서 정의한 스케일러, 벡터, 텐서의 좌표변환적 정의는 그러한 의미를 담고 있다.
그럼에도 불구하고 어떠한 물리량들은 인버전에 대해 이상함(?)을 보인다. 물론, 그 양이 들어있는 물리법칙도 이상함을 보일 것이다. 그러한 물리법칙들은 고개를 꺾어서 보면 아무 이상이 없다가도, 거울을 통해서보면 부호가 반대로 나타난다. 벡터가 뒤집히거나, 부피값이 음의 값으로 나오거나...
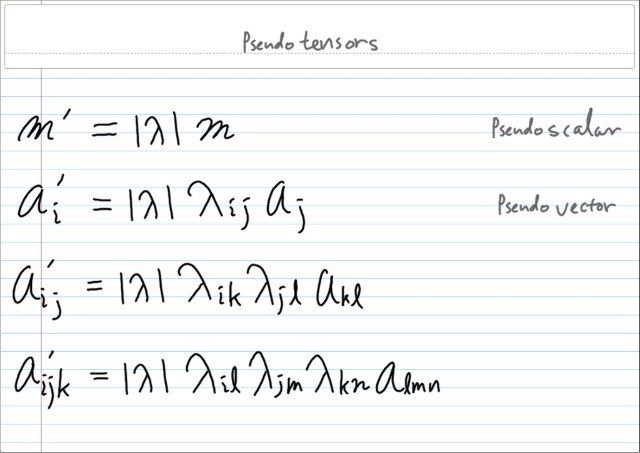
이러한 물리량들은 고개를 꺾어서 볼때는 아무런 이상이 없으므로 텐서가 맞는데, 거울을 통해보면 맞지않게 되므로, 위의 정의에 어긋나게 된다. 이러한 양을 수도텐서(pseudotensor) 라고 한다. 준텐서, 의사텐서 정도로 번역된다. 특히 rank 0 인경우, 수도스케일러(pseudoscalar, 수도스칼라) , rank 1 인경우 수도벡터(pseudovector) 가 되겠다.
수도벡터와 진짜를 구분하기 위해 real vector 등의 용어를 쓰기도 하는데, 성분이 실수인... 이라는 뜻과 혼동스러우므로 그다지 좋은 터미놀로지는 아닌것 같다. 또, 수도스케일러든, 수도벡터든, 좌표계가 정해져버리면, 그순간 그 좌표계에서는 스케일러, 벡터가 되는데, 이때, 왼손좌표계에 맞는 적절한 rule 이 뒤따른다. 책에 따라서는 수도- 를 구분하지 않는 경우도 있다.
요컨대, 수도텐서는 좌표변환을 통해, 다음과 같이 정의된다.